/index.php/article/2021/06/220

自动化plc步进电机伺服控制器:这才是超高速精密加工的核心技术20世纪90年代,随着计算机技术和智能技术的进步和发展,具有一定感觉功能的第二代机器人已经投入实际使用并开始普及,具有视觉、触觉、高灵巧手指和行走的第三代智能机器人相继出现并开始应用。
电机伺服的关键技术
电力机械
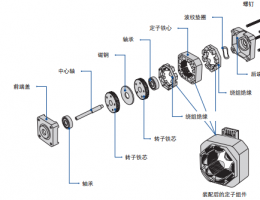
(1)轻量化对机器人用电机的尺寸和重量非常敏感。通过对高磁性材料优化、集成优化设计和加工装配工艺优化的研究,提高伺服电机的效率,减小电机的空间尺寸和重量,是机器人电机的关键技术之一。
(2)在高速时减速比不能大幅度调整时,电机的最大转速直接影响机器人的末端速度和工作节奏;而且,过低的速比会影响电机的惯性匹配,所以提高电机的最大转速也是机器人电机的关键技术之一。20世纪90年代,随着计算机技术和智能技术的进步和发展,具有一定感觉功能的第二代机器人已经投入实际使用并开始普及,具有视觉、触觉、高灵巧手指和行走的第三代智能机器人相继出现并开始应用。
电机伺服的关键技术
电力机械

(1)轻量化对机器人用电机的尺寸和重量非常敏感。通过对高磁性材料优化、集成优化设计和加工装配工艺优化的研究,提高伺服电机的效率,减小电机的空间尺寸和重量,是机器人电机的关键技术之一。
(2)在高速时减速比不能大幅度调整时,电机的最大转速直接影响机器人的末端速度和工作节奏;而且,过低的速比会影响电机的惯性匹配,所以提高电机的最大转速也是机器人电机的关键技术之一。
③直接驱动和中空随着协作机器人的不断成熟和普及,对机器人结构轻量化和紧凑化的要求越来越高,开发大扭矩直接驱动电机、圆盘中空电机等机器人专用电机也是未来的趋势。
(2)伺服
(1)快速响应和精确定位伺服的响应时间直接影响机器人的快速起停效果,影响机器人的工作效率和节拍。
无传感器模式下实现弹性碰撞安全是衡量机器人性能的重要指标。增加力或扭矩传感器会使结构更加复杂,成本更高。基于编码器与电机电流耦合关系的无传感器弹性碰撞技术,在不改变机体结构、不增加机体成本的情况下,一定程度上提高了机器人的安全性。
一体化驱动,一体化驱动控制。驱动一体机,多核CPU多轴驱动控制集成技术,提高系统性能,降低驱动体积和成本。

(4)在线自适应抖振抑制工业机器人的悬臂结构在多轴联动、重载和快速起停时容易产生抖振。机器人本体的刚度应与电机的伺服刚度参数相匹配。刚度过高会引起振动,刚度过低会引起起停响应慢。机器人在不同位置和姿态以及不同工装载荷下的刚度不同,预先设定伺服刚度值很难满足所有工况的要求。在线自适应抖振抑制技术提出了一种无需参数调试的智能控制策略,并考虑了刚度匹配和抖振抑制的要求,能够抑制机器人末端抖动,提高末端定位精度。20世纪90年代,随着计算机技术和智能技术的进步和发展,具有一定感觉功能的第二代机器人已经投入实际使用并开始普及,具有视觉、触觉、高灵巧手指和行走的第三代智能机器人相继出现并开始应用。